
- 전체
- 후기 6753
- 후기-카드 1813
- 후기-발권-예약 1241
- 후기-백신 79
- 후기-격리면제 28
- 질문 57067
- 질문-기타 20628
- 질문-카드 11665
- 질문-항공 10166
- 질문-호텔 5186
- 질문-여행 4026
- 질문-DIY 177
- 질문-자가격리 19
- 질문-은퇴 409
- 정보 24171
- 정보-자가격리 133
- 정보-카드 5209
- 정보-기타 7999
- 정보-항공 3821
- 정보-호텔 3227
- 정보-여행 1057
- 정보-DIY 204
- 정보-맛집 217
- 정보-부동산 38
- 정보-은퇴 257
- 여행기 3417
- 여행기-하와이 388
- 잡담 15459
- 필독 63
- 자료 64
- 자랑 721
- 금요스페셜 106
- 강퇴로 가는 길 11
- 자기소개 661
- 구라 2
- 요리-레시피 70
- 오프모임 200
- 나눔 2699
- 홍보 15
- 운영자공지 32
시리즈가 완성된 기념으로 목차 답니다. :)
[자율주행] 1. 자율주행이란 무엇인가? (부제 Tesla는 왜 자율주행차가 아닌가?)
[자율주행] 2. 자율주행 업계 현황 그리고 그 안에서 Tesla의 위상은?
[자율주행] 3. 자율주행 구현은 어떻게? Camera만 쓴 자율주행은 정말 가능할까?
=============================================================
드디어 자율주행 시리즈 대망의 마지막 편, 센서와 구현편입니다. 지난 번 편에서는 자율 주행 업계에서 가장 주목을 받는 세 업체의 공개 자료를 비교하고, 이를 통해 Tesla의 2020년까지 L5 주행을 구현하겠다는 발표의 현실성이 얼마나 있는지에 대해서 알아봤죠. 이번 편에서는 살짝 조금 더 깊이 파고 들어가서 실제 구현과 관련된 부분을 엿볼까 합니다. 누차 말씀드렸다시피 저 자신부터 일단 자율주행과 전혀 관련이 없는 분야에서 일하고 있기 때문에 어디까지나 일반적인 엔지니어링 상식선에서 이해하고 유추할 수 있는 부분만을 다룰 수 있습니다. 그럼에도 불구하고 자칫 지루하기도 쉬운 이런 소재를 다루는 이유는, 비록 피상적인 토론에 불과하더라도 자율주행에 대한 보다 깊은 이해와 전망을 가능토록 해주기 때문입니다. 적어도 단순히 언론 보도들을 읽는 것에 비해서는 더욱 그렇구요.
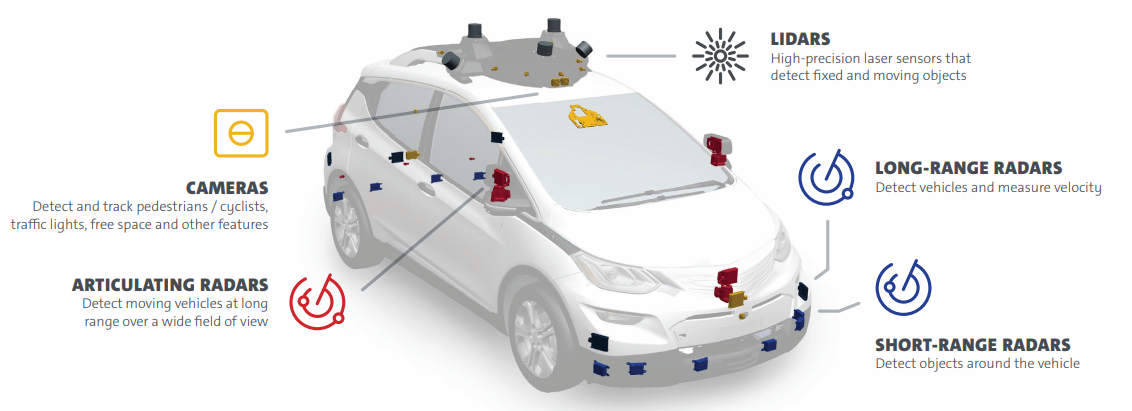
먼저 자율주행에 쓰이는 각종 센서들을 알아볼까요? 한가지 유의하셔야할 점은 같은 종류의 센서라 하더라도 세부적으로 들어가면 기능과 스펙이 천차만별이라는 것입니다. 하지만 제조사에서 특별히 홍보를 하지 않으면 상세 스펙을 알 수 없으므로 그런 경우 표준적인 사양을 가정하겠습니다.
1. Radar
자율주행에 관심이 전혀 없는 분이라도 radar라는 말은 수도 없이 들어보셨을 겁니다. 영화에서도 많이 나오구요. Radio wave, 즉, 전자파를 쏜 뒤에 반사돼서 돌아오는 파장들을 분석하여 주변의 상황을 파악하는 기술입니다. 오래 된 기술이니 만큼 가격과 크기 안정성 등이 최적화돼있고, 현재 Tesla, Waymo, Cruise 3사 모두 radar를 활용하고 있습니다.
일반적인 자율주행 차량용 radar의 주목적은 움직이는 금속성 물체를 감지해내는데 있습니다. (1) 움직이는 (2) 금속성 혹은 고밀도 물체. 이 두 가지가 차량용 radar의 핵심 특성입니다. 먼저 "(2) 금속성 혹은 고밀도 물체". 전자파의 특성 상 금속이 아닌 물질들은 반사되는 파장의 양이 상대적으로 적습니다. 특히 사람의 경우 크기도 작고, 밀도도 낮아서 더욱 심하구요. 따라서 사람이 바로 앞을 지나가도 자율주행 차량용 radar는 인지하지 못한다고 보시면 됩니다. (주1) 작은 비금속 물체들도 마찬가지구요. 이건 반대로 장점이 되기도 하는데, 눈이나 비가 내리는 상황에서도 그런 입자들은 무시되기 때문에 정확하게 다른 차량들을 찾아낼 수 있습니다.
* 주1 - 레이더의 파장과 range에 따라 사람도 파악할 수 있게 만들 수 있고, AEB에는 이런 radar들이 쓰입니다.
그렇다면 "(1) 움직이는"은 도대체 무슨 의미를 가질까요? 정확하게 얘기하자면 radar는 그게 정지해 있든 이동 중이든 간에 대상이 금속성이라면 비교적 작은 물체까지 잘 찾아냅니다. 문제는 radar의 해상도와 평면성에 있습니다. 현재 연구개발 중인 high resolution radar 같은 물건들도 있지만, 현재 일반적으로 쓰이는 radar들은 해상도가 매우 낮으며 고저 구분이 불가능합니다. 영화에서 radar 나오면 그냥 평면에 점이 하나씩 찍히잖아요? 실제 radar에서 뽑아내는 정보도 거의 그 정도라고 보시면 됩니다. "저기 어디에 뭔가 금속이 있음. 근데 크기도 불분명하고, 우리보다 높은 곳에 있는지 낮은 곳에 있는지도 모르겠음. 어쨌든 있음." 정도를 알려주는 거죠. 게다가 실제 radar signal은 노이즈도 상당히 많고 processing이 꽤 필요합니다.
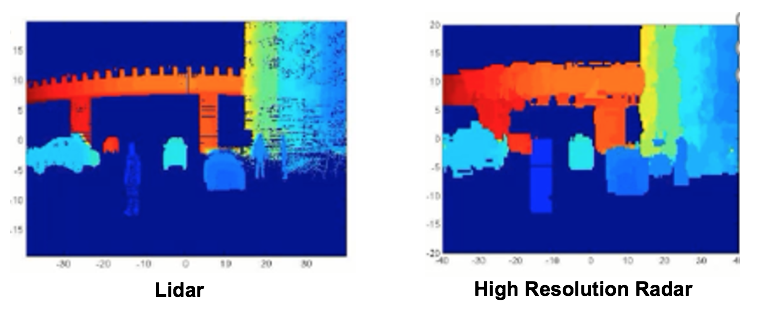
* High resolution radar의 예시입니다. 아직 차량에 상용화된 케이스는 못 들어봤습니다.
근데 radar는 상대 속도 하나는 또 기가 막히게 잘 맞춥니다. Doppler 효과를 이용해서, 즉, 내가 보낸 파장이 돌아왔을 때 변형된 주파수를 확인해서 상대가 나에게 접근 중인지 아니면 멀어지고 있는지를 파악이 가능하거든요. 그래서 자율주행 (L2 포함) 차량에 쓰이는 radar들, 특히 adaptive cruise control(ACC)에 쓰이는 장거리 radar들은 이 정보를 이용하여 정지해 있는 물체들은 무시하게 설계합니다. 그렇지 않으면 예를 들어 저 앞에 있는 신호등이나 도로 표지판, 아니면 noise를 차량으로 오해하고 매번 속도를 줄여서 더 위험하게 될테니까요. 공식적으로 Tesla Autopilot으로 인한 사망사고가 미국에서 세번 있었는데, 모두 이 특성 때문에 truck이나 중앙분리대를 무시하여 발생한 사고일 것으로 추측하고 있습니다.
Radar는 종류에 따라 range가 다른데, 자율주행(L2 포함)에 쓰이는 장거리 radar는 200m 까지도 파악합니다. 대신 이런 경우 감지 각도가 매우 좁다는 (약 10도 가량) 단점이 있습니다. L2 시스템 차량 운전하시는 분들은 급커브에서 ACC가 꺼지는 경험을 해보셨을텐데 이게 그 이유입니다.
2. Lidar
Radar에 대해서는 이쯤 해두고 이제 세간의 화제 lidar로 넘어가보죠. 근래 자율주행 때문에 유명해졌지만 사실 기술 자체는 꽤 오래 됐습니다. 1960년대 초에 개발된 뒤에 학술용, 군사용, 지리 정보용 등으로 다양하게 쓰여져오던 기술입니다. 심지어 이미 상용차에도 lidar가 들어간 역사가 오래 전에 있습니다. 초기의 ACC는 lidar 기술을 사용했거든요. 1997년에 내수용 Lexus LS에 바로 이 lidar가 들어간 ACC 패키지가 제공됐는데 옵션 가격이 무려 $12,700이었다고 하네요.
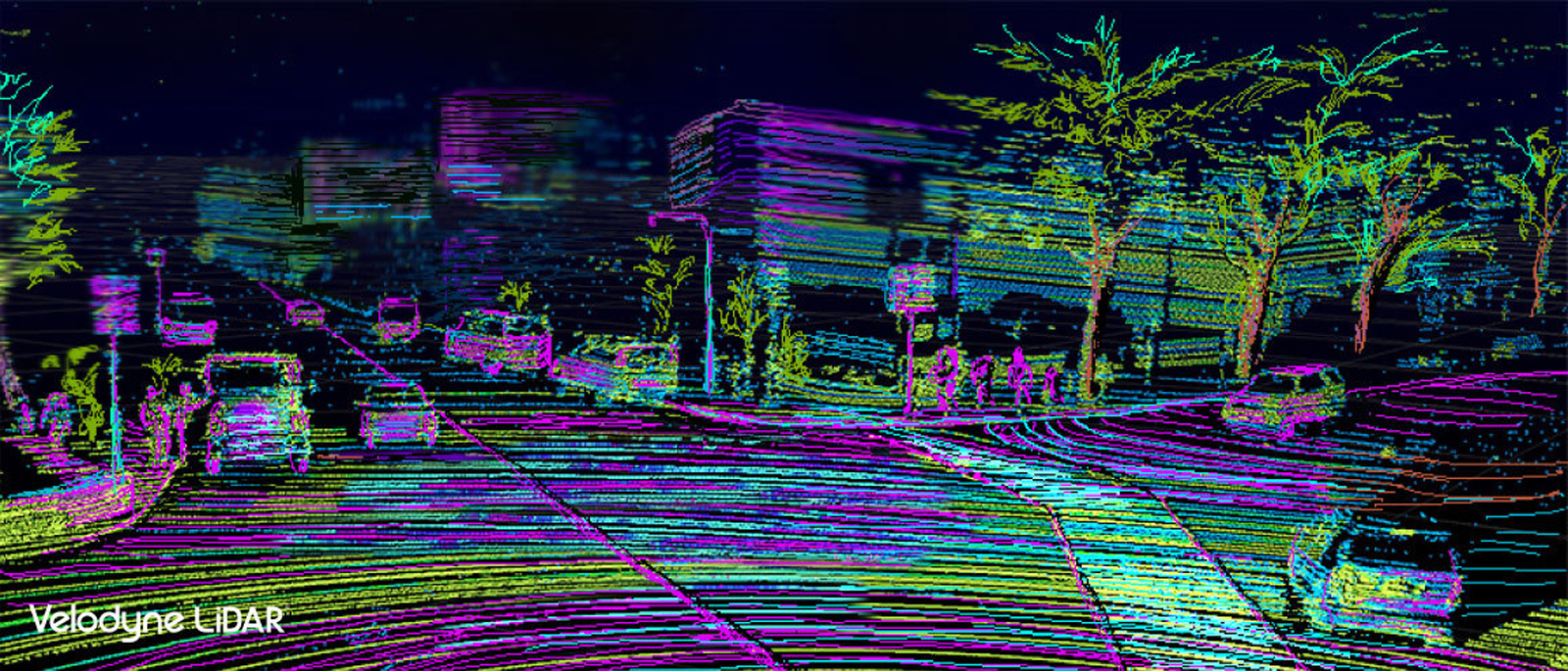
Lidar의 기본 아이디어는 radar와 동일합니다. "뭔가를 쏜 뒤에 물체에 맞고 반사돼서 돌아오는 시간 차를 이용해서 주변의 물체와 지형을 확인한다." 하지만 근본적인 차이가 있으니, 그 쏘는 것이 radar처럼 이리저리 분산되는 전자파가 아니라 목표 지점으로 흐트러짐 없이 날라가는 집중력 대장 레이저라는 것이죠. 그 덕에 radar와는 달리 감지 대상의 재질과는 무관하게 거의 완벽한 3차원 형상 정보를 별다른 추가 프로세싱 없이 수집 가능합니다.
하지만 이런 lidar의 정확도는 오히려 단점이 되기도 합니다. 너무 정확해서 빗방울 혹은 떨어지는 눈발까지 감지해버리거든요. 그리고 안개에도 약한데, 그래도 안개의 경우 밀도가 무척 낮기 때문에 레이저가 어느 정도는 뚫고 지나가는 양이 생겨서 좀 낫습니다. 실제 테스트를 해보면 오히려 일반 카메라보다는 더 잘 본다고 하더군요.
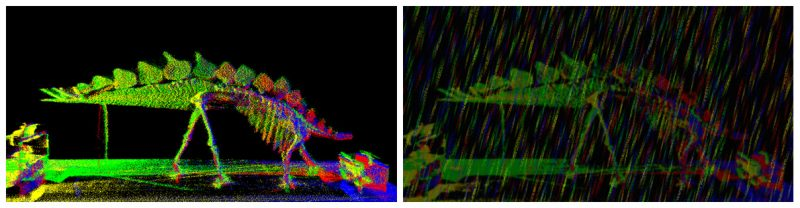
이런 문제들 때문에 lidar 업체나 사용자들은 비나 눈으로 인한 노이즈를 제거하는 추가 프로세싱 로직을 개발하여 돌립니다만, 어쨌든 간에 이런 처리 후에는 해상도가 낮아지는 것을 감수해야겠죠.
잘 알려지지 않은 lidar의 또 다른 단점은 햇볕이 무척 강한 날에는 햇빛으로 인한 노이즈가 생긴다는 겁니다. 이 부분 또한 노이즈 제거 로직을 돌려서 해결하고 있는데, 역시 그래도 야간이나 적당히 흐린 날 만큼의 퍼포먼스는 나오지 않습니다. 그리고, 아직 인체 무해성이 완벽하게 증명되지 않았다는 점, 많은 차량이 lidar를 장착하면 상호 간섭을 완벽하게 피할 수는 없다는 점 등의 단점들이 남아있습니다.
Lidar 역시 깊게 파들어가면 그것만으로도 글을 따로 파야할 만큼 복잡한 얘기들이 나오지만 이쯤에서 정리하고 다음으로 넘어가죠. (손가락이 아파서;;;)
3. Camera
Radar와 함께 모든 자율주행 업체들이 채용하고 있는 센서죠. 색을 판단할 수 있는 사실상 유일한 센서이니 대체재가 없죠. 신호등 색은 볼 줄 알아야 자율주행을 할테니까요. :) Camera야 워낙 잘 알려진 센서라 굳이 자세한 설명은 필요 없을 것 같습니다. (손가락이 아프다는 얘기를 돌려서 하고 있습니다?)
카메라의 장단점 역시 잘 알고 계시지만, 간단히 상기시켜드리자면 색 정보를 처리하는 유일한 센서이고, 안 쓰이는 산업을 꼽는 게 다 빠를 정도로 광범위하게 쓰이는 센서라 가격과 기술 면에서 엄청난 잇점이 있습니다. 하지만, lidar에 못지 않게 (혹은 더 심하게) 날씨에 영향을 받는다는 단점과 역광이나 야간에도 정보 분해능력이 급전직하한다는 문제가 있습니다. 그리고, 화각과 정보량 (혹은 range) 사이에서의 선택을 강요받게 됩니다. 다시 말해 넓게 찍을 수 있는 카메라일수록 같은 대상도 더 작게 감지되므로 정보량이 줄게 되죠. 멀리 있는 대상일수록 문제가 심각해지구요. 참고로 이건 전통적인 차량용 radar도 같은 문제가 있습니다.
4. Ultrasonic sensor
Tesla 만 채용하고 있는 센서입니다. 한국말로는 초음파 센서. 이게 뭐냐면, 주차용으로 후진 센서가 한때 유행했었죠? 후진할 때 뒤에 몇 m 간격이 남아있는지 소리나 숫자로 표시해주는 센서요. 지금은 후방 카메라가 나오면서 다시 사라지는 분위기지만... 그 후진용 센서가 바로 이 초음파 센서입니다. 10m 미만의 초근접 거리 안에서 다른 차량이나 사람의 존재와 거리를 감지하기 위한 센서인데, 아마도 다른 회사들은 lidar나 단거리 radar가 이미 그 역할까지 포함해서 하고 있기 때문에 추가 장착하지 않는 것으로 보입니다.
---
센서 소개는 여기까지만 할께요. 손가락 핑계를 대왔지만, 사실은 갈 길이 너무 멀어서요. :)
이제 1편부터 계속 예로 들어온 3사(Waymo, Cruise, Tesla)가 어떤 센서들을 쓰고 있는지를 알아보고, 그리고 거기에서부터 유추할 수 있는 접근 방법의 차이를 같이 한번 생각해볼까 합니다.
먼저 전통적인(?) 접근 방법을 취하고 있는 Waymo와 Cruise부터 살펴볼까요?
Waymo는 아쉽게도 정확하게 몇개의 센서들을 사용하고 있는지 공개하지 않았습니다. 제가 강의에서 캡쳐한 이 그림과 블로그의 설명으로 알 수 있는 것은 (1) lidar, radar, vision (camera) 세가지 센서를 사용하고. (2) 세가지 센서 모두 같은 영역을 복수의 센서가 커버하도록 중복 설계했으며 (3) 360도가 거의 비슷한 커버리지를 갖도록 했다는 것입니다.
Cruise는 어떨까요?
고맙게도 Cruise는 센서 갯수에 대한 상세 발표 자료가 있더군요. Lidar 5개, radar 21개, camera 16개를 쓴다고 합니다. Waymo가 실제로 각각 센서를 몇개씩 쓰는지 모르겠지만 Cruise의 센서 수는 정말 놀라운 숫자들입니다. 그리고 Waymo와 마찬가지로 (1) Lidar, radar, camera를 사용하고, (2) 세가지 센서 모두 중복 영역이 있는 것으로 보이며 (3) 앞쪽에 약간의 추가 센서들이 보이지만 역시 뒤쪽이나 옆쪽을 포함한 360 커버리지가 고루 높아 보입니다.
이제 Tesla를 보겠습니다.
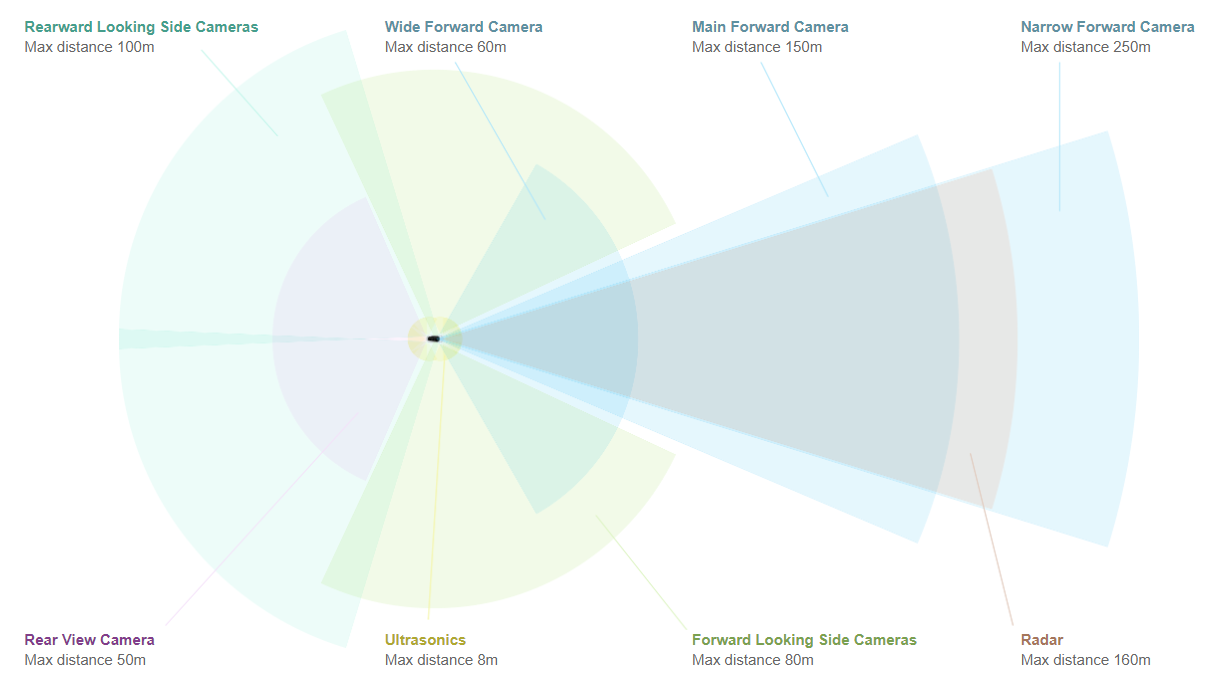
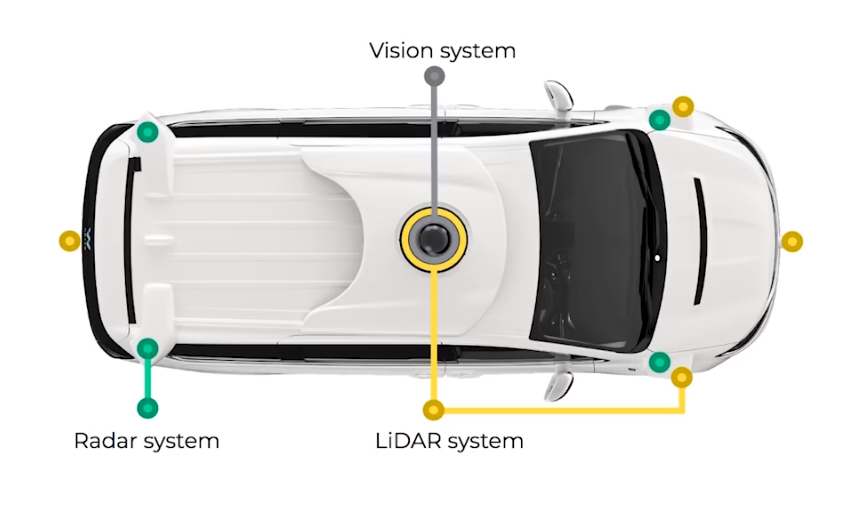
Tesla 역시 친절하게 센서 갯수를 모두 적어놨습니다. Radar 1개, camera 8개, 초음파 센서 12개 입니다. 보시다시피 Waymo, Cruise와는 사뭇 다른 접근 방식입니다. 먼저 전방에 사실상 거의 절반에 가까운 센서가 집중돼있음을 알 수 있습니다. 이것은 아마도 L4+ 자율주행 기술이 완성되기 전에 현재 L2 기능들을 지원해야하기 때문에 채택한 절충안인 것으로 생각됩니다. 또 다른 차이는 중복 커버리지가 적습니다. 예를 들어 후방 50-100m 구간이나 측방 8-80m 구간은 사실상 camera 한대씩으로 커버를 합니다. 그리고 역시 마지막으로 가장 큰 차이는 실질적으로 camera only system이라는 겁니다. 초음파 센서의 range는 8m 밖에 지나지 않으므로 고속 충돌이 가능한 긴급 상황에서는 거의 무의미할테고, radar는 전방에 밖에 없습니다. Camera 입력 만으로 주행 판단을 내릴 수 있게 하겠다는 의지의 표현으로 해석할 수 밖에 없어요.
---
자, 이쯤 되면 elephant in the room을 언급하지 않을 수 없습니다.
"Lidar 없는 L4+ 자율 주행은 가능한가?"
혹은 저는 질문을 살짝 바꾸고 싶네요. 미래엔 lidar가 아니라 high-res radar 같은 것이 그 역할을 대체할 수도 있으니까요. 더 적절한 질문은 이것 같습니다.
"2D vision camera만을 써서 L4+ 자율 주행을 구현할 수 있는가?"
타임 머신이 없는 바에야 정답은 아무도 모르는 문제입니다. 제가 생각하는 답이 있긴 합니다만 좀 더 나중에 얘기하기로 하고, camera 만으로 자율 주행이 가능하므로 lidar는 필요없다고 주장하는 진영의 대표 논리에 대해서 한번 의문을 던져 보고 싶습니다.
"사람들이 눈 두개 만으로 운전을 잘 하는데, 컴퓨터라고 카메라로 못 할 건 뭐냐?"
진짜 그럴 듯한 말이죠? 전문가들도 가끔 이 말에 꿀먹은 벙어리가 되는 걸 봅니다. 근데 말이죠. 이 논리를 다른 곳에 적용하면 어떨까요?
- 새들은 두 날개로 퍼덕이면서 날라다니죠? 그럼 비행기들도 제트 엔진이나 프로펠러 대신 퍼덕이는 날개로 날라다니게 설계한다면?
- 물고기들은 지느러미와 몸의 유연한 움직임으로 빠르게 헤엄쳐 다니죠? 그럼 잠수함들도 그렇게 만드는 것이 가장 효율적일까요?
- 사람들은 두발로 잘 뛰어다니고, 치타는 네발로 무려 시속 100km의 속도를 냅니다. 그런데 왜 굳이 자동차에는 바퀴들을 달았을까요?
- 고흐는 두눈과 손 만으로 인류 역사에 영원히 남을 명작들을 만들어냈습니다. 그럼 똑같이 두눈과 손을 갖고 있는 마모 회원님들도?
많은 발명들이 자연에 존재하는 것들로부터 아이디어와 영감을 얻는 것은 엄연한 사실입니다. 하지만 생물들이 진화를 통해 획득한 능력을 그대로 복제해낼 수 있다는 보장은 없을 뿐더러, 그것이 가장 효율적이거나 쉬운 해결책이라는 보증은 절대 되지 못 합니다. 문명 세계 이기들의 최종 진화 형태는 결국 자연 진화와는 전혀 동떨어진 방향으로 완성되는 것이 오히려 더 흔하니까요.
사람이 두눈으로 운전을 할 수 있으니, 자율주행도 그렇게 할 수 있다 심지어 camera 외에는 필요 없다는 말은 공학적으로는 아무런 의미가 없는, 혹세무민용 말장난에 지나지 않습니다.
---
그럼 다시 Tesla의 실제 예제로 돌아와서, 과연 저 센서들로 L4+ 자율주행 구현이 가능할까요? 저는 최소한 측면과 후방 카메라 센서 업그레이드, 그리고 아마도 높은 확률로 카메라 대폭 추가 없이는 불가능할 것이라고 확신합니다. 간단한 예를 들어보겠습니다.
Tesla의 측면 카메라의 range는 저 위의 센서 참고 자료에서 보시다시피 80m 입니다. 아시다시피 미국에는 신호등 없이 90도 좌회전으로 진입해야 하는 highway가 드물지 않게 있죠. Tesla가 이런 highway에 자율 주행으로 진입해야 한다고 가정하겠습니다. 측방의 최대 감지 거리는 80m 이기 때문에 80m 밖에서 오고 있는 차가 있더라도 인지하지 못하고 좌회전을 시도할 것입니다. 그런데 아시다시피 이런 highway에는 규정 속도 이상으로 달리는 차들이 아주 흔하잖아요. 그래도 무리하지 않고, 마침 80m 딱 바로 바깥에 65 마일로 진행 중인 차가 있었다고 가정해 봅니다. 이 차가 1초에 이동하는 거리는 무려 29m입니다. 따라서 브레이크를 제때 밟지 못하면 3초도 안 돼서 테슬라와 충돌하게 된다는 얘기죠. 아무리 테슬라의 가속도가 좋다고 하더라도 (사실 베이스 모델들은 일반 승용차 대비 엄청나게 좋지도 않습니다만) 정지 상태에서 출발해서 3초 만에 좌회전을 마치고 가속해서 충돌을 피하기란 정말 아슬아슬할 겁니다. 특히 왕복 4차선에서는요.
게다가 이건 그나마 이상적인 경우를 가정한 것입니다. 마침 그 방향으로 해가 지고 있다거나, 밤인데 실수로 (혹은 어떤 미친 놈이) 헤드라이트를 켜지 않고 오고 있다거나, 비가 와서 카메라의 분별 능력이 떨어지는 상황이라면 80m는 커녕 40m 거리에서도 정확한 판단을 하기 힘들 수 있습니다.
Highway 진입 뿐만 아니라, 고속도로의 정체 차선에서 고속 주행 차선(carpool lane 등)으로 진입해야 하는 경우 등 측방이나 후방의 80-100m range가 턱없이 부족한 케이스는 너무나도 많습니다. 결국 이런 문제들을 해결하려면 현재 전방에만 설치돼있는 250m range의 망원 camera나 160m range의 long range radar들을 360도로 촘촘히 다는 것이 선제될 수 밖에 없다고 봅니다. Tesla는 FSD 패키지 구매자들에게 필요에 따라 하드웨어 업글을 무료로 해줄 것을 약속한 상태이긴 한데요. 문제는 이런 장거리 센서들을 추가로 달려면 물리적으로 공간이 안 나오거나 (망원 카메라는 화각이 워낙 좁기 때문에 어디 대여섯개 달아서는 360도 커버가 불가능하죠.) Waymo, Cruise가 쓰는 custom radar처럼 신규 H/W 개발 (= 자금/시간 대거 투자)이 필요하다는 거죠.
참고로 Waymo와 Cruise는 측면과 후면에도 lidar + radar 커버리지가 있기 때문에 200m 가까이를 커버할 것으로 보입니다. 날씨의 영향도 덜 받을 것이구요. 날씨 얘기가 반복 돼서 말인데, Elon Musk가 lidar는 날씨 영향을 너무 많이 받는다며 쓸모 없는 센서라는 식으로 폄하할 때마다 저는 이 사람이 정말 무식해서 그런 건지, 아니면 세상 전문가들이 이제 Tesla는 아예 포기해버린 거라 생각하는 건지 모르겠습니다. 왜냐구요? 위에 나열된 sensor 장착 상황을 보면 사실 Tesla 차량들이 가장 날씨에 취약하거든요. Radar는 날씨의 영향을 거의 받지 않습니다. Waymo와 Cruise는 360도를 다 radar로 둘러버렸지만, Tesla는 앞에 하나만 달았죠. Waymo와 Cruise는 거기에 lidar까지 360도로 박아놨습니다. 게다가 lidar가 아무리 날씨에 약하다지만 그래도 camera보다는 덜 합니다. 눈이나 비로 인한 noise filtering은 lidar 쪽이 구현하기 더 쉽고, fog는 되려 camera보다 더 많이 뚫고 보거든요.
---
마지막으로, 지적 호기심 차원에서 Tesla가 망원 camera를 360도 둘렀다고 가정하고, 순수하게 vision을 이용한 L4+ 자율주행은 가능할지 한번 고민해볼께요. 자율주행 시스템에 들어가는 수많은 기능들 중 실시간 주행과 직접적으로 연관된 네가지 기능에 집중해보겠습니다.
1. 주변 상황의 3차원 형상 분석 (depth perception)
- 30m 전방에 차 모양의 물체가 있으며, 5m 우측방에 사람 형상을 한 뭔가가 있고, 바로 위에는 무슨 철판떼기가 있다는 식으로 주변의 물체들의 형상과 위치를 파악하는 단계입니다. 즉, 이런 data를 뽑아내는 거죠.

아직까지는 개별 대상이 무엇인지는 파악하지 못 합니다. 심지어 한개 한개의 시작과 끝이 어디인지도 모르구요.
2. 형상 인식 및 분류 (visual perception)
- 위에서 인식한 형상에 camera data를 조합해서 실제 그 물체가 사람인지 차인지 표지판인지를 파악하고, 표지판의 내용까지 인식하는 기능입니다. 사실 보통은 1과 2를 합쳐서 perception이라고 합쳐서 칭하는데, 이해를 돕기 위해 분리했습니다.
3. 행동 예측 (prediction)
- 1과 2를 통해 분류해낸 대상들의 향후 행동을 예측합니다. 차량이라면 정지할지 가속할지, 사람이라면 길을 건너려 할지 보도에 계속 머무를지 등을 예상하는 거죠.
4. 다음 행동 결정 (planning)
- 2와 3의 결과, 그리고 나의 과거 판단 내용과 움직임, 향후 주행 경로 등을 고려하여 나의 다음 움직임을 결정합니다.
Lidar를 쓰면 이중에서 1을 거의 날로 먹습니다. Radar를 쓰면 3에서 상당한 도움을 받습니다. (센서 얘기할 때 radar는 인식 대상의 이동속도를 꽤 정확하게 파악한다고 했던 얘기 기억 나시나요?) 그런데 lidar도 쓰지 않고, 심지어 radar조차 전방에만 쓰면서 camera vision 만으로 자율주행을 하겠다는 얘기는 말 그대로 차, 포 떼고 장기를 두겠다는 겁니다. 그런데 문제는 첫편부터 계속 강조해왔듯이 L4+ 자율주행은 90%에서 99%, 99%에서 99.9%, ... 99.999999%를 추구하는, 지리하고도 힘든, 완벽으로의 험난한 마라톤입니다. 그걸 10년 가까이 해온 선두 업체도 아직 한참 멀었는데, 차, 포 떼고 하겠다구요? 사람의 생명이 달린 일인데두요?
여기에서 지난 편에서 언급했던 log를 다시 좀 더 깊이 다룰만한 의미가 있습니다. 전세계에 수백만대가 팔린 Tesla가 실시간으로 모아주는 log를 이용하면 vision only system의 단점을 어느 정도 상쇄시킬 수 있는 것은 사실입니다. 현실적으로 그 엄청난 양의 data를 다 서버에 전송하지는 못 합니다만, federated learning이라고 불리우는 분산 머신 러닝 기법을 쓴다거나 Autonomy day 때 발표한 바와 같이 fleet 전체에 특정 data를 전송할 것을 요청하는 방법으로 그 한계를 부분적으로 영리하게 피해갈 수 있는 방법들이 있습니다.
그러나 가장 근본적인 문제는 machine learning은 엄청나게 어려운 문제에서 최대 9x%를 해내기 위한 수단이지 99.99%를 이룩하는 수단은 될 수 없다는 겁니다. 자율 주행 안에서도 완성도가 100%에 가까워야 하는 부분이 있고, 어느 정도는 떨어져도 큰 지장이 없는 부분이 있습니다. 예를 들어 3. prediction은 사람이 하든 기계가 하든 90% 정확도를 넘기기가 대단히 어려울 것입니다. 그래도 별 문제가 안 됩니다. 예측이 틀리는 나머지 10%에 대해서도 대비책을 마련해놨다가 능동적으로 대처하면 되니까요.
하지만 1. depth perception은 다릅니다. 여기서 큰 오류가 발생하면 그 뒤로는 돌이킬 방법이 없는 상황에 닥치기도 합니다. 예를 들어 4거리에서 신호 위반을 하고 질주를 하는 교차 차량을 발견하지 못 하고 직진을 시작했다면? 뒤늦게 발견해봤자 대처 방법이 전혀 없겠죠. 그런데 depth perception은 대단히 어려운 문제에 속합니다. 예를 들어 요즘 스마트폰에 들어가는 portrait mode도 depth perception을 이용한 기능이죠. 근데 3D sensor에 카메라를 두개씩 쓰는 스마트폰도 있지만 여전히 드물지 않게 여기저기 삑사리가 나잖아요? 이런 삑사리들 중 큰 것들 하나 하나가 자율주행 차량이 인식하지 못한 다른 차량들이라고 생각해보세요. 얼마나 섬찟한 일입니까? 이 회사들이 과연 data가 부족해서 혹은 machine learning 기술이 딸려서 아직까지 이게 100% 완벽하지 못한 걸까요? 참고로 Google Photos 앱으로 전세계의 사진을 아마도 이미 수조 장 이상 갖고 있을테고, machine learning으로는 의심할 여지 없이 최강자 중 하나인 Google의 Pixel 폰도 여전히 완벽과는 거리가 멉니다.
심지어 자율주행 차량의 depth perception은 스마트폰 카메라의 portrait mode보다 훨씬 더 어렵기까지 하죠. 구분해야 할 물체도 한두개가 아니고, 광량도 들쭉날쭉에, 저조도에 고속으로 움직이는 피사체도 부지기수, 심지어 광량이 좋은 날은 버스 정류장 유리벽에 반사된 이미지가 혼란을 주기까지 합니다.
이쯤에서 제가 생각하는 "2D vision camera만을 써서 L4+ 자율 주행을 구현할 수 있는가?" 질문에 대한 답을 하고자 합니다.
"왜 그걸 꼭 할려고 하는데? 그냥 하지마..."
"그래, 연구하다보면 뭐가 나올 수도 있으니깐 연구하는 거 자체야 좋지. 근데 그냥 니꺼나 조용히 해. 쓸데없이 남 디스하지 말고 ㅠㅠ"
지난 번 편 서두에 disclaimer로 내건 것 중에 이런 게 있었죠. "Tesla가 자율주행 기술이 딸리는 건 알겠지만, 그래도 상용차 중에 Tesla 만큼 한 곳이 있냐?" 라는 질문은 하지 말아달라고... 지금 달착륙을 위한 기술을 논하는데 상용 여객기 중에 제일 높이 가는 게 무슨 소용이냐고... Vision-only 자율주행도 마찬가지입니다. 이미 자율주행이 보편화돼있고, 안정성 검증 방법이 다 나와있는 상태에서 원가 절감을 위해 vision만 쓴 자율주행을 개발하겠다고 하면 몰라도, 아직은 아닙니다. 지금은 돈을 얼마를 들여서 간에 일단 달착륙이 가능한 방법을 뚫을 단계이지 거길 싸게 가는 방법을 연구할 단계가 아닙니다. 자율주행처럼 불특정 다수의 생명이 달린 기술에는 더욱더 그렇습니다.
---
3편이 길게 될 거라고 예상은 했지만, 정말 이건 생각보다도 훨씬 더 길게 됐습니다. 최대한 많은 컨텐츠를 넣기 위해 노력을 했지만, 결국 써놓고도 이건 너무 디테일한 부분이다 혹은 전체 맥락 상 방해만 되겠다 싶어 삭제한 양이 30% 가까이 되는 것 같습니다. 일부는 계획하고 있는 번외편, L2 운전 보조 시스템 편에서 재활용할 예정이지만 대다수는 영원히 빛을 보지 못할 것 같아 자꾸 아쉬움이 남네요. 저도 자발적으로 이렇게 긴 글을 써보는 건 처음인데, 글쓰기의 어려움과 아픔을 진하게 체감하고 있습니다. ㅎㅎ
그럼 좀 긴 휴식 후 번외편에서 뵙겠습니다. 감사합니다.
---
(사족) - Lidar 관련한 부분에서 왜 가격이나 내구성 문제를 지적하지 않았는지 의아해 하실 분들이 계실 것 같아서... 일단 이 부분을 굳이 넣지 않은 이유는 간단합니다. 달착륙에 다시 비유할께요. 이 시리즈의 목적은 달착륙까지 할 수 있는 우주왕복선을 처음 만들 수 있느냐 없느냐를 논하는 것이지 얼마나 경제적으로 갈 수 있느냐, 앞으로 달 여행을 대중 상품화하려면 로켓 재활용을 해야 하지 않겠냐를 논하기 위함이 아닙니다. 그런 건 일단 몇번 안정적으로 가고 얘기해야죠.
그리고, lidar의 가격이 비싼 가장 큰 이유는 아직 수요가 없어서 대량 생산을 할 이유가 없었기 때문입니다. Waymo만 하더라도 아직 대량 생산에는 들어가지 않았음에도 불구하고 6년만에 자체 개발 lidar의 생산가를 $75k에서 $7.5k로 90%나 낮췄습니다. Lidar의 필요 사양이 최적화되고, 대량 생산이 시작되면 개당 몇백불 수준도 충분히 가능한 시나리오라고 생각합니다.
사실 이것도 문맥 흐름 상 뺀 내용인데 궁금해하실 분들이 너무 많을 것 같아 사족으로 넣습니다. ㅋㅋ
- 전체
- 후기 6753
- 후기-카드 1813
- 후기-발권-예약 1241
- 후기-백신 79
- 후기-격리면제 28
- 질문 57067
- 질문-기타 20628
- 질문-카드 11665
- 질문-항공 10166
- 질문-호텔 5186
- 질문-여행 4026
- 질문-DIY 177
- 질문-자가격리 19
- 질문-은퇴 409
- 정보 24171
- 정보-자가격리 133
- 정보-카드 5209
- 정보-기타 7999
- 정보-항공 3821
- 정보-호텔 3227
- 정보-여행 1057
- 정보-DIY 204
- 정보-맛집 217
- 정보-부동산 38
- 정보-은퇴 257
- 여행기 3417
- 여행기-하와이 388
- 잡담 15459
- 필독 63
- 자료 64
- 자랑 721
- 금요스페셜 106
- 강퇴로 가는 길 11
- 자기소개 661
- 구라 2
- 요리-레시피 70
- 오프모임 200
- 나눔 2699
- 홍보 15
- 운영자공지 32
62 댓글
Sparkling
2019-06-09 19:32:46
드디어 올려주셨네요. 감사히 잘 보겠습니다. 다음편도 기대합니다!
얼마에
2019-06-09 19:47:48
앗싸 이등!
으리으리
2019-06-09 19:49:48
아기다리 고기다리 던 게시물이군요. 감사해유.
------------------
재밌게 잘 읽었습니다! 재활용이 안되는 부분들은 짤막하게 따로 헤딩만 달아서 나중에 번외로 올리는건 어떨까요?ㅎㅎㅎ
헐퀴
2019-06-09 21:36:10
그게... 육체적으로도 좀 힘든 상황이고 (이 시리즈를 쓰다가 터널 증후군이 왔어요;;
일을 그렇게 해봤어봐) 원고가 워낙 난잡해지다보니 나중에 재활용하겠다는 확신이 있는 부분 빼놓고는 다 지웠습니다 ㅠㅠ으리으리
2019-06-09 21:45:36
네.. 글쓰는게 정말 고역이죠... 이렇게 질 높은 글을 써주셔서 감사할따름입니다. 덕분에 재미있는 주제에 대해 많이 배웠어요!
복숭아
2019-06-09 19:50:18
맘잡고 자세히 읽어봐야겠어요. 이런글 너무 좋아요!
긴 시간과 노력으로 엄청난 글 써주셔서 정말 감사합니다!!
논문정복
2019-06-09 19:59:57
wow. 재미있네요
jhkim
2019-06-09 20:15:31
지적하신대로 Lidar는 여러 차량에서 동시에 쏠 경우, 서로 간섭이 생기고, 어떤 차량에서 쏜 것인지 ID가 없어서 ... 자칫 다른 차량에서 쏜 엉뚱한 신호를 받을 경우 생각지도 못한 사고로 이어지게 됩니다. 지금이야 한정된 지역에서 몇 대 안되는 차량으로 테스트를 하고 있지만, 이런 위험요소가 대중화를 막을 수 밖에 없어요. 불과 몇주전 닛산(?)에서 자율주행 청사진을 발표했는데... 테슬라와 유사한 접근이었던 것으로 기억되네요.
헐퀴
2019-06-09 21:43:49
Lidar의 신호 간섭 문제는 이런 종류의 센서들은 모두 갖고 있는 문제이고, 센서가 대중 보급되면 다 어떻게든 해결이 가능합니다. 심지어 아예 간섭이 없는 lidar도 연구는 끝나있구요.
Nissan의 커멘트는 로이터의 과장보도를 유사언론들이 확산시킨 것입니다. 두가지 문제가 있는데요. (1) 앞으로 영원히 lidar를 안 쓰겠다고 한 게 아니라 지금 당장 L2가 실리는 상용차에는 lidar의 가성비가 너무 낮아서 못 쓰겠다는 얘기였습니다. 이 부분은 Nissan 대변인이 재확인해줬죠. (2) Nissan은 이번에 radar 커버리지를 높여 360도를 확보했습니다. 현재 상태만 비교해도 vision-only인 Tesla와는 유사하다고 보기 힘들고, 이번에 이렇게 구체적인 내용을 발표한 건 ProPilot 2.0이라고 일본 내수용에 들어가는 L2 시스템일 뿐, L4+ 자율주행 관련해서 발표한 것은 로드맵 외에 구체적인 것이 없습니다.
루스테어
2019-06-09 22:49:42
coherent detection 말씀하시는 건가요? 이거만으로 모든 문제가 해결되었다고 보기엔 좀 힘들듯 한데요.
개인적으로는 비젼을 메인으로 가져가야한다는 주장은 어느정도 이해합니다. 그걸 제대로 프로세스를 못하니까,
그리고 보다 더 잘하기 위해서 다른 센서의 도움을 받아햐 하는 거죠.
lidar 의 경우는 아직 해결해야될 게 너무 많아요. 낙관적으로 생각하시는 거만큼 반도체랑은 다른 영역의 이야기라,
그렇게 쉽게 해결되지 않을거라고 봅니다. 레이져 시스템이 생각만큼 간단하지 않아요. 문제도 많구요.
(그래서 한동안 이거하나만으로도 먹고 살 길이 있을거라 보기도 합니다만.. )
헐퀴
2019-06-09 23:06:31
Inference reduction 테크닉들이나 inference free lidar들은 소개자료들만 읽고 자세히 공부하진 않았습니다. 말씀하신 것처럼 어렵다라고 말하는 쪽도 있고, 기본적인 noise reduction에서 벗어나지 않는다는 사람들도 있고 의견은 다양하더군요.
어쨋든 "lidar도 이런 문제들이 있지 않느냐?"라는 질문은 현 시점에선 전 시기 상조에 논점 흐리기라고 봅니다. 본문에 썼듯이 lidar를 쓰느냐 마느냐가 중요한 게 아니라 그것이 무엇이든 간에 고성능 장거리 depth sensor를 써서 최대한의 안전을 확보하는 것이죠.
루스테어
2019-06-09 23:35:00
네, 맞아요. 먼저 말씀드리면 전 depth 센서는 필요하다고 보고, tesla 의 현재 어프로치는 문제가 있다고 봅니다.
개인적으로 볼때, 근본적으로 vision 과 말씀하신 다른 depth sensor 들의 차이점은 passive detection 이냐 active pulsing/detection 이냐는 거에요.
Active pulsing 시에 대부분의 wave 기반의 모든 기술들이 영향을 받을 수 밖에 없는 것은 숙명이에요. 어떤 형태라도 쏘고 받는 형태에서는 간섭에서 자유롭기 힘들어요.
하지만 passive detection 은 현재 상태에서 위치에 따라 다르지만 모든 시스템에서 유사하게 받는 유일한 정보기 때문에, 이를 메인으로 가져가는 것이
나을지도 모르겠다는 생각입니다. 다른 센싱 기술들이 필요없다는 것은 아니지만 비젼을 중심으로 발전시켜야 한다는 것에는 저는 어느정도 동의해요.
그래서 개인적으로는 니산의 어프로치를 지지하는 편입니다만.. 뭐, 비젼도 밤에는 현재 우리 눈만큼의 sensitivity 가 확보가 힘들기 때문에 순수 passive 가 될지는 모르겠습니다만.
여튼, 많은 논의가 있어야 하는 건 분명합니다. Lidar 혹은 다른 depth sensor 들의 양산 문제나 기술 문제가 그렇게 호락호락한 문제들이 아니거든요.
그래서 Wave 로 먹고 사는 입장에서 미래 먹거리로 industry 쪽에서는 Depth sensor 가 될거라고 보고 있습니다.
가장 이상적으로 좋은 해결책은 각 차량들, 근처에 있는 차량들끼리 통신을 해서 서로 정보를 주고 받을 수 있어야 한다고 봅니다.
그리고 이러한 기술들이 단독으로 발전시키는게 아니라, 연합체를 구성해서 표준 기술안으로 가져가야한다고 봅니다만, 그러기엔 아직 시장이 여물지는 않았지요.
사실 개인적으로는 걱정도 많이 되고, 기대도 많이 되는 분야입니다. 앞으로 20년 뒤가 궁금해요. 어떻게 되어있을까.
헐퀴
2019-06-10 00:04:36
네, 저도 이 타래의 첫 댓글에 썼듯이 이런 종류의 센서라면 간섭의 영향에서 자유롭지 않다는 것은 인정합니다. 하지만, Waymo와 Cruise의 차량들은 모두 redundancy를 통해 그것 만으로도 상당히 문제 요인을 제거하고 들어가는 부분이 있기 때문에 개별 센서 레벨에서 획기적인 개선책이 나오기 전에도 기본적인 솔루션들 만으로도 충분히 상용 서비스화 가능 수준까지는 갈 수 있으리라 봅니다. 사실 정확하게는 그게 critical path가 아닐 거라고 하는 게 더 맞는 표현이겠네요. 진정한 L4+ 자율주행 로직 구현 자체가 훨씬 더 오래 걸릴테니...
사실 vision을 메인으로 가져간다는 건, "메인으로 가져간다"의 정의에 따라 다르겠지만 어느 정도는 당연한 명제가 아닐까 싶습니다. 필수이면서도 대체가 불가능한 센서니까요. 이 글에는 분량 상 생략했지만 Waymo, Cruise는 vision sensor에 대해서도 상당한 투자를 해서 customize를 해낸 것으로 홍보합니다. 여담이지만 항간에 보면 Tesla가 하도 camera camera 하니깐 마치 다른 업체들은 lidar"만" 쓰는 걸로 착각하는 사람들마저 있더군요 ㅎㅎ
어쨋든 간에 제가 생각하는 미래는 결국 이런 선두주자들이 막대한 투자로 L4 자율주행 차량들을 도로에 성공적으로 내놓기만 하면, 그 뒤로는 기반 기술, 검증 시스템, 사회 제도, 인프라 등 많은 부분에서의 논의와 발전에 엄청난 가속도가 붙을 것으로 예상합니다. 자동차를 처음 개발할 때에는 누가 도로를 이렇게 포장해서 시속 70마일로 달려댈 수 있을 거라고 상상이나 했겠습니까? 그래서 자꾸 달착률에 비교하면서 일단 어떻게든 첫단추를 꿰는 것이 중요하다고 하는 것이구요. 그 뒤로 아주 단순한 인프라 개선이라도 이뤄지기 시작하면 vision only 등의 좀 더 대중화가 쉬운 solution들도 충분히 더 연구할 수 있는 거구요. 그러니깐 결론은 그냥 Tesla는 자기네 연구나 착실히 하고, 앞길 뚫어주는 선도 업체들 쓸데없이 딴지 걸고 발목 잡지 좀 말라는....;;;
MAGNETIC
2019-06-09 20:52:41
오우 너무 재밌습니다!! 전 개인적으로 더 기술적인 내용으로 후벼파는것도 충분히 여러 사람들이 이해하지 않았을까 합니다. 이런 내용들을 이렇게 술술 풀어내시는 능력에 감탄하고 정말 재밌게 글 봤습니다.
감사합니다^^
nysky
2019-06-09 20:58:29
방대한 글 재미있게 잘 읽었습니다~
자율주행이 나아가야할 기술적 부분을 좀더 알게 되는거같아요.
제가 잠깐 봤더니 1년에 교통사고 사망자가 1.3 밀리언 이더군요. ;;;
정말 어머어마한 생명이 매년 교통사고로 죽더군요.
자율주행부분은 국가예산을 많이 쏟아서라도, (자연환경보호 예산처럼) 인간이 좀 극복했음 좋겠어요.
전 인간의 운전은 너무 불안정하다고 보고 있습니다.
혹시 도로위에 모든 차량들이 관제탑(?) 을 통해서 통제되는 시스템 같은건 전혀 고려도 안되고 있나요?? --;
신호등 같은것마다 중간 관제탑이 있고, 동시에 차량을 통제만 한다면.. 걱정하는 많은 부분이 될수도 있을텐데..
비용이 문제인건가요?
헐퀴
2019-06-09 21:48:37
모든 차량들이 자율 주행으로 동시에 바뀔 수 있다면 가능한 미래겠죠. 현실적으로는 근미래엔 불가능하고... 얘기가 나오는 방법 중엔 특정 지역 안에서는 자율주행 robotaxi만 주행을 허용하면 어떻겠냐는 안 정도는 있더군요.
근데 (이것도 구체적인 건 삭제한 내용 중에 있는 건데 ㅠㅠ) 아무리 이상적인 robotaxi라고 진짜 차량소유를 100% 대체할 수 있는 건 아니라서... 현실성은 잘 모르겠습니다.
이슬꿈
2019-06-09 21:51:46
요즘 스마트폰에도 들어가는 ToF 센서를 쓰면 depth sensing이 되지 않나? 싶었는데 Lidar가 결국 ToF였네요. Lidar의 비용 혁신은 뜬금없이 모바일 시장에서 이뤄질지도 모르겠어요. 이게 다시 자동차로 돌아가면 되는거겠죠...
헐퀴
2019-06-09 22:16:50
그래서 저는 본문에도 썼듯이 "lidar가 필요하냐"는 좀 misleading한 질문이라고 생각합니다. 결국 lidar가 아니라 다른 제3의 depth sensor가 대세가 될 수 있는 거니까요. "2D vision-only로 할 수 있냐" 혹은 "Depth sensor 없이 할 수 있냐"라는 것이 맞겠죠.
기너
2019-06-09 21:53:59
진짜 한 숨에 재밌게 잘 읽었습니다.
안전에 직접적으로 관련된 기술이니까 '빨리'보다 '정확히'가 중요할 것 같은데 사용자를 너무 베타테스터처럼 생각하는 게 아닌가 싶습니다.
헐퀴
2019-06-09 22:17:18
감사합니다. 사용자를 베타테스터로 이용 --> 이 부분은 번외편에서 상세히 다루려 합니다.
헐퀴
2019-06-09 22:19:21
지난 번 글서부터 손가락에 지장이 왔는데, 이번 편 쓰면서 터널 증후군이 아주 제대로 와서 가급적이면 타이핑을 줄이려 합니다. 격려의 말씀들에 일일이 감사 댓글 달아드리지 못하는 점 양해 부탁드리겠습니다 ㅠㅠ
얼마에
2019-06-10 00:31:15
댓글 그만 다시고, 원문은 보이스 레콕니션으로 쓰세요.
칼리코
2019-06-10 01:06:46
1편에서 말씀하신것 처럼 아직 갈길이 멀군요.
cashback
2019-06-10 01:29:27
글 잘읽었습니다. 3편의 글을 읽어나가면서 자율주행과 테슬라에대한 생각이 제 스스로 많이 정리기 되었구요. 막연히 언젠가는 되겠지라는 생각에서 정말 쉽지 않겠구나라는 입장으로 바뀌었습니다. 돌이켜보면 완전자율주행도 좋지만 지금단계에서는 L2만 완벽하게 구현되도 운전의 피로도 (특히 장거리)가 확실이 줄어서 사용자 입장에서는 이정도만 되도 정말 좋다고 느끼거든요.
다시 느끼지만 글빨이 좋으시고 부럽습니다. ㅎ
잔잔하게
2019-06-10 02:14:45
좋은글 감사합니다.
손목 빨리 나으시기 바랍니다!
poooh
2019-06-10 09:49:31
글을 다 읽고 나서 드는 생각은
1. 엘론머스크, 얘는 정말 미국 놈이다
2. 테슬라 사면 안되겠다
3. 미국 비지니스 하는 놈하고 인도 아이티 하고 정말 꿍짝이 잘 맞을수 밖에 없구나
4. 헐퀴님은 어쩔수 없는 엔지니어구나
nysky
2019-06-10 10:03:31
저는 더더욱 이런 회사들에 투자도 하고 물건도 사줘야 하는구나 라고 느꼈는데 ㅎ
전 개인이 됐든, 기업이 됐든, 국가가 됐든 더더욱 하루빨리 나아가야 한다고 봅니다. ( https://youtu.be/Q4Te2-m2Tok )
진짜 인간의 운전은 너무 큰 사회적 비용을 지불하는거 같습니다.
포트드소토
2019-06-10 11:38:24
https://en.wikipedia.org/wiki/Motor_vehicle_fatality_rate_in_U.S._by_year
인도 이야기 들어보면 도시 사거리에도 신호등이 아직 없는 곳이 아직도 많다니.. ^^ 그냥 전세계 비교하면 너무 편차가 클 것 같구요.. 그런 나라들에서 무인주행차로 바꾸라고 하기에는 돈이 절대로 없어서 불가능할테니요..
세계 데이타 말고, US 데이타 보고 가실께요.. 2017년 보시면 10만명당 11명 사망. 1억 마일 주행당 1명 죽었데요..
그럼.. 앞으로 무인 주행차 개발되서.. 1억 마일 주행할때마다 1명 죽을 정도 비율로 개발 되려면 돈이 얼마나 들어갈까요?
현재 인간 운전 vs 같은 사고 비율의 무인주행 차 + 인프라 의 사회적 비용 비교시... 제 추측으로는 무인주행으로 바꾸는데.. 돈이 10배는 더 들어갈 것 같은데요?
뭐.. 저도 자세히 계산해 본 건 아니구요. 100% 뇌피셜이요.. ^^ 기왕 뇌피셜로 적어보자면.. 또한 이런 1명사망 / 1억마일 주행 정도의 무인주행차 개발도 앞으로도 무지무지 어렵거나.. 차만으로는 불가능할겁니다. 그래서, 결국 필요한게.. Intelligent Smart Road. 그런데.. 이건 돈이 상상 못할 정도임..
그런데.. 사실 미국에서 현재보다 사회적 비용을 더 줄이면서도.. 교통사고 사망률을 더 줄일 수 있는 방법을 제가 압니다.. 답은 조금 있다 달아드릴께요.. ^^
헐퀴
2019-06-10 13:04:45
이건 저도 전혀 생각해보지 못 했던 perspective네요. 흥미로운 관점 제시해주셔서 감사합니다. :)
nysky
2019-06-10 13:31:36
현재 미국에서 매년 37,000명정도가 죽은거네요.
나중엔 경기부양을 위해서라도 돈이 쓰여져야할때도 있겠죠.
설령 돈이 열배가 들어도, 그거로 인해서, 백배를 벌어들일수도 있는게 또한 돈이기에..
어쨌건.. 퀴즈 답 알려주세요~~ 궁금해요 ㅎ
포트드소토
2019-06-10 13:45:47
open question 이예요.. 답좀 달아보세요.. 다른 분들의 번뜩이는 아이디어도 보게요.. ㅎㅎ
Blackstar
2019-11-30 23:18:32
이게 사실 통계의 함정입니다. 사실 고속도로처럼 마일 만빵 올라가는 상황에서는 사람이 별로 안죽습니다. 사람이 많이 죽는 건 은근히 35마일 정도로 달리게 되어있는 시내 구간들이죠. 특히 보행자들이요 (이게 정확한 통계는 저도 한 번 보고 출처를 잊어서 찾기는 어렵습니다. 죄송합니다.). 그래서 1억 마일 주행 당 1명은 사실 많이 뻥튀기된 숫자입니다. 자율 주행차들도 고속도로 포함해서 달리면 그 정도로 낮아지는데 생각보다 시간 오래 안걸릴겁니다.
헐퀴
2019-06-10 13:18:17
ㅋㅋ 제가 평소엔 저보다 훨씬 geeky한 엔지니어들에 둘러 쌓여 지내면서 난 커리어를 잘못 선택했나 고민하다가, 회사 뿐만 아니라 다른 인터넷 게시판들과 비교해서도 엔지니어들이 훨씬 적은 마모 게시판에만 오면 저도 천상 엔지니어라는 걸 실감합니다.
poooh
2019-06-10 13:44:30
이게 참 perspective 가 달라서 그래요. 헐퀴님이 천상 엔지니어라 그러는 이유는
이글에 보면, 완벽하지 않은 기술을 어찌 실생활에 적용 시키냐 라는 고민이 글에 묻어 나오기 때문입니다.
비지니스는 그렇게 생각 안해요.
대충 90% 가능하면, 시판하고 나머지는 warranty나 maintenance로 넘겨 버리죠.
그게 product의 maturity를 90%에서 97%정도로 올리는 비용이 엄청나고, 97%에서 99% 올리는데에
천문학적인 비용이 들어 가는걸 알기 때문에 그렇습니다.
결국엔 프로덕트 메니지먼트 쪽에서는 사고 안나고 적당히 굴러 갈만한 제품을 만들어 내는 곡예를 시도 하지요.
지금 테슬러도 보세요. auto pilot 4.0, 5.0 이니 하는 말장난 하고 있고, auto pilot ready 된 차량을 만불 이던가 더 받고 팔아 먹고 있잖아요.
그리고 정말 황당한건, 항상 auto pilot을 enable 하려 하면, 모든 liability는 운전자에게 있다고 하는 discliamer를 항상 동의 하게끔 하고,
auto pilot을 사용 할 수 있게끔 만듭니다.
즉, auto pilot 중에 일어나는 사고는 모든 운전자 잘못이고, 운전자가 책임을 져야 해 라는 문화를 만들고 있고, 모두들 그렇게 따라가고 있죠.
물론, 그로인한 법적 책임도 면책 받고 있구요.
아마 저노무 auto pilot ready는 보통 일반인들 차량 소유기간 통계가 4-5년이고,
현재 테슬러 구입 하는 사람들이 실제로 auto pilot을 사용하게 될 일은
통계상으로 상당히 낮을 거라는 계산아래서 판매하는 maketing gimmick 이라고 밖에 안보입니다.
헐퀴
2019-06-10 14:04:39
아, 그런 의미셨군요 ㅎㅎ Autopilot은 자율주행이 아니라 L2 시스템이기 때문에 저도 완전히 다른 관점을 가지고 있습니다. 자세한 건 번외편에서 :)
저는 오히려 현업에서 오래 뛰어서 닳고 닳은지라;;; 신입(?)들이 완벽에 완벽을 기하느라 일정이 늦어지는 걸 보면 "유저들은 생각보다 훨씬 창의적이고 똑똑하니깐 걱정마. 문제가 생겨도 우리가 상상도 못했던 방법으로 해결하게 돼있어." 하고 달래서 마무리 시키곤 합니다 ㅋㅋ 이 글에서 완벽을 얘기하는 이유는 인간의 생명이 달린 L4+ 자율주행이기 때문이구요. 번외편을 보시면 진짜 엔지니어 다운(?) 접근 방법을 느끼실 수도 있을 것 같습니다. ㅎㅎ
포트드소토
2019-06-10 11:27:46
좋은 글입니다. 일반인들이 이해하기 쉽게 글을 잘 쓰시는 실력이 있으시네요.
Lidar 참 매력적인 센서입니다. 예전에 제가 무인 주행차를 개발할 때는 3D Lidar 란게 없었거든요. 그 당시는 CCD camera + Laser radar sensor + Sonar 로 했거든요.. 그때는 Lidar 란 용어가 없었는데.. Laser radar 라고 불렀습니다. laser 를 이용하긴 하는데.. 3D 데이터는 안 나오고.. 좁은 각도로 그냥 정면에 장애물 거리 측정하는 거였습니다. 요즘 집들 내부 거리 잴때 laser ruler 쓰잖아요? 그런거 비슷한거죠. 지금 같은 3D Lidar 가 있었으면 여러가지 문제들이 쉽게 해결되었을 겁니다.. 요즘 개발환경이 참 부럽네요.. 지금은 휴대폰 CPU 속도만 해도 어마무시하고.. ㅎㅎ 세상이 좋아짐..
그리고, Camera 가 제한은 많은데.. 여전히 중요한 기능 중 하나가.. 바로 차선 인식입니다.. Lidar 로도 차선인식은 안되거든요.
카메라로도 차선 정보 + 원근점 을 이용하면 차선과 곡선을 굉장히 정확하게 인식이 가능하고, 또한 Stereo 카메라로 다시 perspective transformation 해서 2D 좌표로 바꿀 수 있습니다. 2D to 2D 인데.. 앞의 2D는 XY 식의 좌표에서.. 뒤의 2D는 하늘에서 본 2D 좌표. 뭐.. 하여간 기존의 카메라 베이스 무인주행이 대부분 이런 식이었죠.. 그런데.. 늘 문제가 많은게.. 주변의 차나 장애물, 보행자 등등을 제대로 인식하기가 힘들었죠.
그걸 요즘 NN으로 한다는데.. (사실은 벌써 20년 전부터 하긴 했던건데.. 그때는 컴퓨터가 느려서 제약이 많았음) 여전히 문제가 많아요.. 뭐.. 논문이나 Demo 에서는 다 되는 것처럼 자랑하지만.. ^^.
제가 늘 말하는 거지만.. NN이 딱 적당한 분야는 오직.. 틀려도 별 상관없는 분야입니다.. ^^.. 예를 들어.. 카드 회사 자동 응답.. 질문해 주세요.. 카드 캔슬 하시겠다구요? 삐.. 처리 되었습니다.
하여간.. 완벽한 자율 주행이라기 보다는 그냥 허접한 자율주행이라도 되려면 Lidar 는 무조건 필수로 보입니다.
싸구려 CCD camera 로 차 빙 둘러서 붙이면 저렴하긴 할테지만.. 책임지고 팔 수 있는 자율 주행차는 못 만들거라는데 $2 겁니다.
또는 책임 안 지고는 만들어 팔 수 있을겁니다.
Fatboy
2019-06-10 12:20:17
좋은글 감사합니다만'''
테슬라 S 이번주에 픽업하는데 뭔지 모르지만 마음이 내키질 않네요....
에구구....
헐퀴
2019-06-10 13:07:45
와~ 축하드립니다!
Elon Musk의 무리한 자율주행 실행 계획에 대해서 경각심을 일깨우려는 것이지, 절대 Tesla 차량 자체를 비판하고자 하는 의도는 없습니다. 좋은 차임이 분명하니깐 행여나 제 글 때문에 찜찜해 하지 마시고 즐기세요. :) 늘 하는 얘기지만 저도 언젠가는 한대 사려고 합니다.
입만열면거짓말
2019-06-10 13:29:47
글 잘 보고 있습니다.
1. 센싱은 "최종 핵심"이 아닐 것
사실 sensing은 가격과 기다림의 문제라고 봅니다. Lidar 가 엄청 싸지면 Tesla 도 마찬가지로 쓰겠죠 :) 글들 보면 lidar 가 expensive & unnecessary shortcut 이라고 안쓰고 있는 듯 하니, 빠져나갈 구멍 (나중에 lidar 를 추가할 구실) 은 있군요.
다른 종류의 센서의 이질적인, 특유의 장단점을 가진, 그리고 (상황 또는 오작동으로) 상충되는 입력들을 가지고 어떻게 최종적인 perception 과 planning 을 "제대로" 하는 것이 사실 가장 중요한 핵심이고, 그게 말씀하는 "달착륙을 위한 기술"이라고 저는 봅니다.
왜 센싱이 최종 핵심이 아니냐...는 문제를 다르게 보면 됩니다. 1) "완벽한 센싱"이 문제를 해결할까요? 2) "완벽한 센싱"이 가능한가요?
2. "완벽한" 자율주행만이 "자율주행"으로 인정 받는 것은 아닐 것
예를 들어, 25 ms 의 반응속도로 피할 수 있는 사고를 차 A 는 피할수 있고 차 B 는 못피한다고 칩시다. 차 B는 자율주행이라고 부를 수 없는 것일까요? (참고로 https://www.passmefast.co.uk/emergency-stop-game 해보시면 본인의 반응속도를 보실수 있습니다)
현재 상황이 어떤지는 모르겠지만, 물론 어떤 "기준"이 세워지겠지요. 그 기준이 "어느 정도" 여야 우리는 만족할까요?
- 현재 인간보다 나으면 된다 (최소)
- 기술이 허락하는 한 가능한한 좋아야한다 (최대)
아마 그 사이 어디인가겠지요.
기계의 센싱/인지/판단 능력은 인간의 인지/판단 능력에 비추어 보면 장단점이 있습니다. 장점은 누구도 부인하지 않아요. 정말 문제는 1) problem 과 criteria 을 어떻게 잡느냐 (현재 L0-L5 는 추상적인 목표이지, 실제 기준은 아니죠) 2) 그 안에서 "인간에 비해 부족한 점"을 얼마나 인정하고 받아들일 수 있느냐입니다.
3. 제가 생각하는 잡다한 관련된 관전 포인트들
- 보조 시스템의 개선과 의무화: 가격이 내려가고 시장의 선택에 따라, 보조 시스템이 법적으로 의무화되고 있습니다(ABS, backup camera 는 이미, 충돌방지시스템은 예정).
- 사람의 시각 인지 능력을 카메라 + 이미지 프로세싱이 얼마나 따라 잡을까: 이건 사실 자율 주행 말고도 정말 무궁무진 활용가능한 부분이기 때문에 그 누구도 포기하지 않을 겁니다.
- 자율주행과 기존 사람 기반의 교통 문화/시스템과의 tension
- connected car
- security & privacy
헐퀴
2019-06-10 13:55:45
맞습니다. 선두 업체들이 계속 고전하고 있는 것도 결국 planning 부분에서 파도 파도 끝이 없이 edge case가 튀어나오기 때문일 거라고 보고 있습니다. 그런데 planning 쪽은 사실상 업체 별로 공개된 디테일이 전무하고, 공개된 내용도 이해하기 어렵거나 업체 간 비교가 무의미하기에 일단 가시적인 부분인 sensor에 중점을 두게 됐네요. Perception 관련해서 문제도 업계 친구에게 들은 바가 있는데, 이건 그 친구도 그냥 사내에서 주워들은 얘기라 인용하기가...
사실 이 글의 원래 첫 시작은 99.9...% 완성도를 따질 때 소숫점 아래 9가 몇개 붙어야 과연 믿을만한 자율주행으로 인정해줄 것인지에 대한 논의로 시작했었습니다. 평균적으로 일반 운전자가 10만 마일에 크든 작든 사고를 한번 정도는 낸다고 가정했을 때, 이걸 100 마일당 사고 횟수 기대값(이라고 쓰니 왠지 죄짓는 기분;;;)으로 변환하고, 결국 완성도 = 100마일 운행 시 사고를 전혀 안 낼 확률로 정의해서 어쩌고 저쩌고 풀기 시작하다 보니깐, 이게... 확률을 공부하지 않았거나 까먹은지 오래 된 분들께 읽으라고 쓰는 글이 아니더라구요;;; 그래서 그냥 싹 지워버리고 간단한 시작으로 바꾸고, "최대한 완벽에 가까운"이나 "99.999...%" 등으로 표현하기로 했습니다. ㅎㅎ
어쨌든 또 말이 길어지고 있는데... 100%는 불가능하다는 전제 하에 정말로 자율주행 서비스가 본격 출범한다면 아무리 잘 만들어도 언젠가는 사고가 날테고, 그럼 또 그 사고 기록을 가지고 자율주행이 이런 것도 못 막았니 어쩌니 하면서 한동안 떠들썩할 것 같습니다. 이세돌 기사가 유일하게 승리한 알파고 대전에서의 의문의 한수 같은 결정이 자율주행에서 나오지 않으리란 법이 없으니까요. 자율주행 기술이 개발되는 것 못지 않게 말씀하신대로 자율주행의 한계를 인정하고 받아들이는 과정 + 부가적인 사회적 변화 또한 지리하고 혼란스러운 여정이 될 수도 있을 것 같습니다. 제 생각에는 결국 세대를 따라가게 되지 않을까 싶기도 하구요. 자율주행이 보편화된 시기에 자란 세대들이 사회의 메이저가 되고나서야 비로서 자연스럽게 받아들여지는...
아잉슈타인
2019-06-10 13:43:57
너무 좋은글 감사합니다. 헐퀴님 글에 영감을 받아서 Comma AI Openpilot 설치해서 잘 쓰고 있습니다. 헐퀴님 번외편 쓰실때 좀더 자세한 사용후기를 남기려 합니다만, 일단 전체적인 사용평은 "생각보다 훨씬 좋다 " 입니다. 전체적인 평에서 테슬라 오토파일럿 보다 약간 못하다는 평가는 있지만 저는 완전 만족하고 있고 여러 차량에 향상된 L2 시스템을 상대적으로 저렴한 가격에 설치 할수 있어서 장점이라고 봅니다. 다시 한번 정성스런 좋은글 감사하고 번외편 기다리겠습니다.
헐퀴
2019-06-10 13:57:32
와~ 저 OpenPilot 후기 진짜 궁금해요! 저야말로 기대 만빵입니다. 번외편을 서둘러야 할 이유가 생겨버렸네요 ㅎㅎ
cfranck
2019-06-10 14:52:22
정성이 가득 담긴 양질의 초 장문 글을 보고 답을 달지 않는 것은 예의가 아닌것 같아서 무조건 달고 갑니다.
전혀 다른 이야기입니다만, 사장님이나 대통령처럼 높은 위치에 오르게 되면 본인이 맡는 모든 분야를 속속들이 완벽히 알 수 없는 법이잖아요. 그 모든걸 다 경험했을 수도 없고, 시간 내서 경험할 수도 없고, 그런다고 실무자들 레벨로 상세히 알 수도 없고. 그러니까 주변의 참모들이 핵심만 잘 요약한 보고서를 읽고 보스가 단시간안에 상황을 파악하도록 하는 인사시스템을 갖추는거고요. 오랜 시간 들여 올려주신 글이 딱 그런 내용을 담고 있다고 봅니다. 자율 주행 업계의 현 상황, 쟁점, 목표, 기술적 난관 등을 빠르게 훑어볼 수 있었네요. 폐쇄된 커뮤니티에서나 유통될법한 고품질의 글 올려주셔서 다시한번 감사합니다.
그와 별개로 글을 보면서 계속해서 드는 생각은, 인간의 인지 / 판단 능력이란 참으로 엄청난 것이었구나 하는 깨달음입니다. 저렇게 복잡 다단한 상황이 존재할 수 있음에도 큰 무리없이 이만큼 굴러가는 교통 및 관련 법률 시스템은 (현 단계의 인공 지능에 비하면 무한에 가까워보이는) 인간의 인지능력을 전제로 구축된 것들이잖아요. 자율주행을 둘러싼 인공 지능의 발전사를 보면서 거꾸로 인공이 아닌 자연 지능의 위대함에 다시한번 놀라게 됩니다.
헐퀴
2019-06-10 17:07:49
그렇게 느끼셨다니 영광이고 보람있습니다. :)
자연 지능은 정말 위대합니다. 전 그래서 Elon Musk나 Ray Kurzweil 등이 얘기하는 특이점이 과연 그렇게 쉽게 올까하는 의문을 갖고 있습니다. 이건 저보다 훨씬 전문가분들이 많으실테니 누군가 써주시면 참 감사할텐데요.
그럼저도...
2019-06-10 21:55:46
댓글을 안남길 수가 없는 정말 멋진 글이라는 데 100000% 동의합니다.
덕분에 흥미로운 내용에 대해 보다 깊이 알게 되었습니다.
번외편도 목 늘이빼고 기다리겠습니다!!
헐퀴
2019-06-11 16:19:39
간밤에 Cruise에 대해 정말 흥미로운 기사들이 났군요.
https://www.forbes.com/sites/bradtempleton/2019/06/10/gmcruise-leaks-show-them-ridiculously-behind-waymo-its-time-for-better-more-public-metrics/#1ade4e9015b1
https://jalopnik.com/gms-cruise-self-driving-prototypes-are-riddled-with-tec-1835414849
상당히 다양한 내용의 정보가 실려 있는데, 아직 회사라 자세히 보진 못 했습니다. 눈길을 잡아끄는 몇가지 내용만 소개해드리자면...
- Cruise는 (그리고 다른 자율주행 업체들도) disengagement가 발생할 때마다 시뮬레이션을 돌려서 만약 그대로 뒀으면 어떤 일이 발생했을지 확인해서 심각도 별로 분류를 함.
- 놀랍게도 평균 매 3,000 마일마다 꽤 심각한 사고가 발생하는 수준을 겨우 벗어났음.
(그럼 작년의 5,000마일마다 한번이라는 disengagement report와 숫자가 맞지 않는 것 같은데 어떻게 받아들여야 할지 모르겠네요)
- 참고로 평균적인 일반 운전자는 10만 마일마다 한번씩 재산 피해가 발생하는 사고를 내고 (저 위 댓글에서 제가 찍은 숫자가 맞았어요! ㅋㅋ) 28만 마일마다 한번씩 부상 등이 발생하는 심각한 사고를 냄
- Waymo는 2015년까지 이렇게 세부적으로 분류가 된 report를 자발적으로 발행하다가 중단했음. 마지막 리포트의 숫자는 23만 마일 동안 사고 없이 주행한 적도 있고, 전체 평균으로 나눠도 42만 마일 중 13번 뿐임.
- Cruise는 주로 SF 도심에서 테스트하고, 당시 Waymo는 상대적으로 한적한 곳에서 테스트한 숫자라른 걸 감안해도 이 정도면 1, 2위 차이가 그간의 추측보다 훨씬 많이 나는 것이 아닐까?
- Disengagement report의 분류를 더 세분화하고 적용 기준을 강화할 필요가 있음 (+10000!)
- Cruise 자율주행 차량은 데모 중에 멈추거나 컴퓨터가 다운되는 일까지 있었다고...
제가 달착륙에 비유하는 게 절대 과장이 아닙니다. 어쩌면 더 어렵다고 봐도 과언이 아니죠. 개인적으로 10년 안에 진정한 L4+ 구현이 판매용 차량까지는 힘들어도 자율주행 로보택시 서비스 형태로는 완성되지 않을까라는 생각이었는데, 이것조차 확신하긴 힘들겠네요.
이쯤 되면 "L4+ 한다는 거 다 사기임. 나중에 어찌 어찌 구현해도 너무 조심스럽게 운전하느라 쓸모가 없을 것임. 그 노력으로 L2를 끝내주게 잘 하는 게 훨씬 말이 됨!" 하면서 Comma.ai를 창업하고 OpenPilot을 만들어버린 geohot이 진정한 선지자였나 싶기도 합니다 ㅎㅎ
AncientMan
2019-08-27 08:46:48
현재 타고 있는 자동차가 기본적인 L2 수준인데,(2014 Q50 하브 풀옵션) 곧 페이먼트가 끝나는 데다가 일본차 끌기 싫기도 하고 하여
테슬라를 기웃거리다가 해당 포스팅을 찾게 되었습니다...
내린 결론은 그냥 돈 아끼면서 L2에 만족해야겠네요. 현재 차량이 마력이 딸리는 것도 아니고 연비도 봐줄만하니...
Lidar 에 대해 사족을 하나 더 하자면, 제가 어릴 적에 Laser Jammer 라는 것을 달고 댕기면서 과속운전을 조금 했었습니다.
당시에는 뭐 자동크루즈 같은 것이 별로 없긴 했었다지만, 이 장치는 Lidar 신호를 받으면 교란시켜서 경찰 스피드건을 무력화 시키는 녀석입니다.
앞 범퍼 뒷 범퍼에 설치 후 전원까지 끌어줘야하는데, 개인적으로는 덕(?)을 톡톡히 보았습니다. (애틀랜타-올랜도 3.5시간, 뉴욕-애틀랜타 10시간 미만)
물론 이것과 Radar detector 를 같이 사용해줘야 하구요. (Radar 와 Laser 는 완전 다른 기술, State Trooper 는 Radar, Local LEO들은 Laser 를 주로 사용)
원리는 스피드 건에 차량이 맞으면 즉시 교란신호를 보내서 경찰의 스피드건이 속도를 측정하지 못하게 합니다. 계속 교란시키고 지나가면 경찰이 의심하니 물론 경보 울리면 감속 후 장치 스위치를 꺼줘야 했구요,(ex. 160마일 주행중 경보 후 적당히 70마일로 감속) 그러면 경찰은 감속된 스피드를 측정하게 됩니다.
여튼 이놈을 몇년 쓰면서 느낀 점은 경찰 Lidar Gun 뿐만 아니라 바라보는 모든 Lidar Sensor를 교란시킨다는 느낌이었는데,
(정면에 신형 차량이 오면 100% false alarm 뜨면서 교란 시작함) 이 장치가 불법이 아닌지라 생각보다 위험하다고 할 수 있겠네요.
설사 이녀석 때문에 애꿏은 다른 자율주행차가 사고가 나더라도 얘가 범인이라는 것을 증명하기 힘들 듯...이미 반대편에서 지나갔으니까...
물론 본인은 결혼 후 다 팔아치우고 평범하게 운전하고 댕깁니다.
헐퀴
2019-08-29 14:46:14
제 생각에는 이미 단순 jammer 정도는 대응할 수 있도록 lidar 센서들이 설계되고 있고, lidar의 갯수도 여러개에 radar와 vision 등으로 2중, 3중의 보호막이 있기 때문에 일반 소비자용 제품 때문에 큰 문제가 발생할 확률은 낮을 것 같습니다. 근데 전문가 집단이 작정하고 테러하려면 그건 막을 수 없을 것 같아요.
근데 시속 160... 아틀란타 올랜도 3시간 반...은 정말 ㅎㄷㄷ 하셨네요;; 앞으로도 계속 평범하게 안전운전 하세요! ㅋㅋ
얼라이쿵
2019-08-28 09:29:57
헐퀴님ㅋ
해당 분야 종사자입니다. ㅋㅋ mobilenet v3 베이스로 임베딩 단계구요
실례지만 쪽지 보내드려도 될까요?
헐퀴
2019-08-29 14:46:41
쪽지는 물론 환영입니다만... 전 그냥 호사가일 뿐입니다. 무셔요;;;
헐퀴
2019-11-30 20:25:17
유튜브 메인에 추천돼서 봤는데, 제가 쓴 3부작 내용들과 같은 맥락에서 일반인 시각에 적절한 수준으로 잘 설명한 NBC 취재 내용이 있네요.
https://www.youtube.com/watch?v=qf6VrDZ04EQ
사실은 제가 쓴 내용이랑 너무 일치해서 뿌듯함을 금치 못 하고 올려봅니다;;;으리으리
2019-11-30 22:45:41
에잉 헐퀴님 글이 훨 낫네용 ㅎㅎ
헐퀴
2019-11-30 22:52:53
데헷~ 부끄부끄...
지금 1편부터 다시 읽어보니깐 문장 수준이 뒤로 갈수록 떨어지는 게 느껴지네요 ㅎㅎ 나중엔 진짜 약속을 지키겠다는 사명감으로 버티며 쓴 듯;;;
얼마에
2019-12-01 00:31:45
#활자천국유튭지옥
얼마에
2020-02-11 23:13:53
https://www.autodaily.co.kr/news/articleView.html?idxno=416434
"모델 3는 달리고 코너링을 하고 멈춤을 하는 제어는 고성능 컴퓨터 HW3.0과 3개의 ‘보디 컨트롤러’가 실행을 한다.
약 70개의 ECU로 차량을 통제하는 독일 폭스바겐의 엔진차량에 비해 훨씬 적은 수치다. 때문에 에너지 제어시스템도 매우 간단하고 효율적이다.
파워트레인을 전기화하면 부품 수가 줄어들기 때문에 ECU도 자연히 적어지게 된다.
하지만 테슬라의 모델 3는 다른 전기차 와도 확실한 차이를 보여준다. 같은 전기차인 닛산자동차의 전기차 리프나 현대 코나 같은 전기차도 적어도 30개 정도의 ECU가 탑재되고 있는 것으로 알려져 있다.
즉, 테슬라 전기차의 강점은 중앙집중식 고성능 컴퓨터로, 수 십개의 작은 단위의 ECU를 장착하고 있는 차량들을 효율성과 성능 면에서 훨씬 앞선다는 것이다."
제이유
2022-10-31 22:50:36
조회수 로 정렬 할수 있는줄 몰랐는데, 이글이 압도적 1위네요 와
헐퀴
2022-11-01 00:05:59
헐퀴;; 무슨 일일까요? 시리즈의 다른 글들에 비해서도 압도적으로 많네요. 어쨌든 영광입니다 ㅎㅎ
군신
2022-11-22 18:24:12
1편부터 3편까지, 너무 재밌게 잘 읽었습니다.
감사합니다!!!
헐퀴
2022-11-23 19:36:25
오래된 글인데 댓글 남겨주셔서 감사합니다! 덕분에 더 보람이 있네요 ^^
이성의목소리
2022-11-24 10:21:13
이제 테슬라는 저 초음파 센서까지 없애겠다는데 원가를 뭐 얼마나 줄이려고 저러나 싶습니다
무지렁이
2024-03-22 06:43:46
오랜만에 끌올합니다. 최근 테슬라 사용자분들의 댓글들에서 오토파일럿이나 FSD가 돈값 못한다고 하시는 걸 많이 봤는데 중국의 자율주행차들의 근황을 보니까 또 눈이 휘둥그래지네요. 테슬라처럼 비전으로만 하는 차도 있고, 라이다 쓰는 차도 있네요.
중국차 자율주행 최신근황 (2024년 3월)
헐퀴
2024-03-22 13:25:53
한두달 전에 Reddit에서 Tesla의 FSD 접근방법에 대해 정말 너무나도 깔끔한 논평을 보고, 이 글 또 끌올 되면 올려야지? 하고 있었는데 마침내 @무지렁이 님 덕에 그 날이 왔네요 ㅎㅎ
---
This should be an FAQ because somebody comes in to ask questions like this pretty regularly.
Tesla has taken the strategy of hoping for an AI breakthrough to do self-driving with a low cost and limited sensor suite, modeled on the sensors of a 2016 car. While they have improved the sensor and compute since then, they still set themselves the task of making it work with this old suite.
Tesla's approach doesn't work without a major breakthrough. If they get this breakthrough then they are in a great position. If they don't get it, they have ADAS, which is effectively zero in the self-driving space -- not even a player at all.
The other teams are players because they have something that works, and will expand its abilities with money and hard work, but not needing the level of major breakthrough Tesla seeks.
Now, major breakthroughs in AI happen, and are happening. It's not impossible. By definition, breakthroughs can't be predicted. It's a worthwhile bet, but it's a risky bet. If it wins, they are in a great position, if it loses they have nothing.
So how do you judge their position in the race? The answer is, they have no position in the race, they are in a different race. It's like a Marathon in ancient Greece. Some racers are running the 26 miles. One is about 3/4 done, some others are behind. Tesla is not even running, they are off to the side trying to invent the motorcar. If they build the motorcar, they can still beat the leading racer. But it's ancient Greece and the motorcar is thousands of years in the future, so they might not build it at all.
On top of that, even in Tesla got vision based perception to the level of reliability needed tomorrow, that would put them where Waymo was 5 years ago because there's a lot to do once you have your car able to drive reliably. Cruise learned that. So much to learn that you don't learn until you put cars out with nobody in them. They might have a faster time of that, I would hope so, but they haven't even started.
---
기술적인 설명을 거의 하지 않고도 현재 상황을 이렇게 잘 설명할 수가 있다니 정말 샘이 날 정도였습니다. 특히 볼드 처리한 부분이 현재 상황을 정말 깔끔하게 잘 설명해준 것 같아요.